




Herausragend im Feld: Roboter, die Obst pflücken können
Manufacturers face increasing pressure to reduce emissions, improve energy efficiency, and meet sustainability goals while maintaining productivity and profitability. This article explores the bigg...
Wage ich es, einen Pfirsich zu pflücken?
– mit Entschuldigung an T.S. Eliot
Gartenbauliche Roboter kommen, um die empfindlichsten Ernten zu bewältigen. Gerätehersteller nutzen die jüngsten Fortschritte bei Sensoren, künstlicher Intelligenz (KI) und Robotik, um autonome Systeme zu entwickeln, die bestimmte Früchte und Gemüse erkennen, den Unterschied zwischen unreifen und reifen Exemplaren feststellen und nur die erntereifen schonend pflücken und verpacken können.
Eine verbundene Geschichte: Landwirtschaft und Innovation
Die Landwirtschaft war stets eine Inspiration für technologische Innovationen, von ausgeklügelten Bewässerungssystemen vor 5.000 Jahren in Mesopotamien über eine vor 2.000 Jahren in China erfundene Sämaschine bis hin zur relativ kürzlich (1794) in den USA patentierten Baumwollentkörnungsmaschine.
In den letzten Jahren haben viele der bemerkenswertesten Fortschritte in der Agrartechnologie autonome Maschinen umfasst. Selbstfahrende Fahrzeuge wurden eingesetzt, um Ackerland zu pflügen, Samen zu säen, das Pflanzenwachstum zu überwachen und Pestizide auszubringen.
Sie wurden auch zur Ernte von Feldfrüchten verwendet, vor allem Getreide wie Weizen, Mais und Reis, aber auch Sojabohnen und Baumwolle. Diese Kulturen waren immer robust genug, um auch grobe Behandlung durch einige der frühesten und einfachsten landwirtschaftlichen Maschinen zu überstehen.
Empfindlichere Kulturen wie Steinobst (z. B. Pfirsiche, Pflaumen, Aprikosen), Tomaten und Erdbeeren hingegen sind leicht beschädigbar. Selbst erfahrene Landarbeiter können einen Apfel quetschen oder eine Beere mit einem kurzen Moment der Ungeschicklichkeit zerdrücken.

Abbildung 1. Konzept der automatisierten Ernte. Bild mit freundlicher Genehmigung von Adobe Stock
Eine Maschine zu bauen, die mit der Geschwindigkeit, Geschicklichkeit und dem geübten Fingerspitzengefühl eines erfahrenen Landarbeiters mithalten kann, ist eine gewaltige Herausforderung, aber die Umstände zwingen dazu.
Bewältigung eines schwierigen Arbeitsmarktes
Seit mindestens zwei Jahrzehnten klagen Landwirte weltweit über die Schwierigkeit, qualifizierte Arbeitskräfte zu finden. „Selbst in landwirtschaftlichen Zentren wie Kalifornien, wo die Löhne manchmal über 20 USD pro Stunde liegen, motivieren hohe Löhne die Menschen nicht, körperlich anstrengende und repetitive Aufgaben wie das Pflücken von Beeren zu übernehmen“, so ein Bericht der Marktforschungsfirma Markets And Markets aus dem Jahr 2023.
Arbeitskräftemangel in der Landwirtschaft wurde durch politische Maßnahmen verschärft. Oft sind die erfahrensten Landarbeiter Migranten, doch viele Länder, in denen sie früher saisonale Arbeit fanden, haben Einwanderungs- und Handelsgesetze erlassen, die die internationale Arbeitsmigration entmutigen oder sogar ganz einschränken.
Der US-Bundesstaat Georgia verabschiedete 2011 ein strenges Einwanderungsgesetz; Georgia meldete in jenem Jahr einen Mangel von 11.000 Arbeitskräften, und lokale Landwirte verloren über 120 Millionen Dollar bei dieser Ernte. Das Vereinigte Königreich berichtete, durch den Brexit 330.000 erfahrene Landarbeiter verloren zu haben.
Landwirte stehen beim Arbeitskräfteangebot vor großen Problemen, und eine ihrer wenigen Optionen, um im Geschäft zu bleiben, ist die Automatisierung. Große Unternehmen wie John Deere und Komatsu stellen autonome Traktoren und Mähdrescher für die am weitesten verbreiteten Nutzpflanzen her: Weizen, Mais, Reis, Sojabohnen und Baumwolle. Robotersysteme für Obst und Gemüse sind rar, da die Herausforderung sehr groß ist.
Doch der Bedarf ist groß, und eine Reihe von Startups wurde gegründet, um solche Maschinen zu entwickeln. Einige große Industriehersteller investieren in diese Startups (zum Beispiel Kubota und Bosch), aber auch Obst- und Gemüsebauer investieren.
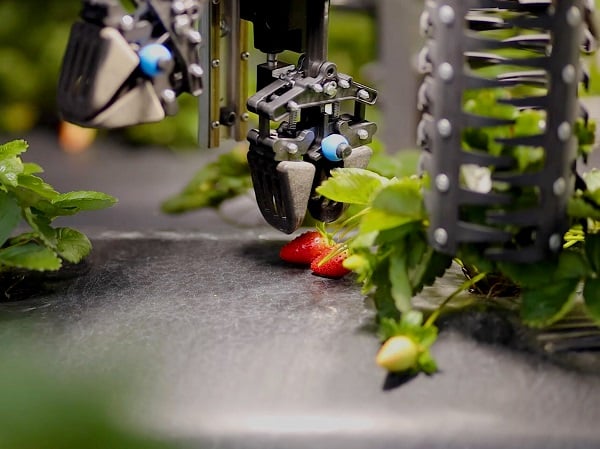
Abbildung 2. Greifer, die empfindliche Kulturen schonend pflücken. Bild mit freundlicher Genehmigung von Harvest CROO
Startup-Profile
Im Folgenden finden Sie kurze Beschreibungen einiger Unternehmen, die in den letzten 10 Jahren gegründet wurden, um gartenbauliche Roboter zu bauen. Die Beispiele geben einen Überblick über die verschiedenen Ansätze bei Manipulatoren und Sensoren.
Harvest CROO
Harvest CROO, 2013 in Florida gegründet, hat robotische Module mit Manipulatoren – gepolsterte Roboterklammern – entwickelt. Die Module sind unter dem Fahrgestell des autonomen Fahrzeugs des Unternehmens montiert. CROO steht für computerized robotic optimized obtainer; es ist kein Zufall, dass die Abkürzung wie „crew“ ausgesprochen wird.
Tevel Aerobotics Technologies
Tevel Aerobotics Technologies, 2017 gegründet und in Israel ansässig, stellt Luftdrohnen her, die dafür ausgelegt sind, Früchte von Bäumen zu pflücken, darunter Äpfel, Birnen und verschiedene Steinobstsorten, mithilfe von Saugnäpfen an leichten Auslegern. Die Drohnen drehen die Früchte von den Bäumen und legen sie in die Ladefläche eines autonomen mobilen Sammlers, an den sie angebunden sind.
Ripe Robotics
Ripe Robotics mit Sitz in Australien entwickelt ein Fahrzeug namens Eve, das mit Roboterarmen zum Pflücken von Baumfrüchten wie Äpfeln ausgestattet ist. Eves Arme sind ebenfalls mit Saugnäpfen zum Pflücken der Früchte versehen.
Fieldwork Robotics
Fieldwork Robotics aus Großbritannien hat ein ähnliches Fahrzeug mit vier Roboterarmen, die einige der empfindlichsten Früchte ernten können – Himbeeren. Das Roboterfahrzeug umfasst jede einzelne Beere vorsichtig mit der Hand und schneidet ihren Stiel ab.
Agrobot
Agrobot aus Israel hat ein autonomes Erdbeerpflückfahrzeug entwickelt, das mit Roboterarmen endet, die mit Greifern ausgestattet sind, um die Stiele jeder Frucht zu greifen und abzuschneiden. Ziel ist es, zu vermeiden, dass die Manipulatoren die Früchte berühren.

Abbildung 3. Erkennung und Pflücken von Früchten von einer fliegenden Plattform. Bild mit freundlicher Genehmigung von Tevel Aerobotics
Ermöglichende Technologie
Jeder gartenbauliche Roboter verwendet optische Sensoren, um sich zunächst durch das Pflanzenlaub zu navigieren und die Früchte zu finden und dann reife Früchte zu identifizieren. Die meisten bestehenden Systeme geben an, KI einzusetzen, die zur Bewertung verwendet wird, ob eine Pflanze ganz, makellos und erntereif ist.
Computervisionssysteme werden manchmal in Kombination mit Radar, Ultraschall und Lidar eingesetzt. Diese zusätzlichen Sensoren können natürlich zur Früchterkennung und -bewertung verwendet werden, dienen aber auch der Navigation. In vielen landwirtschaftlichen Anwendungsfällen (wie beim Pflücken von Beeren, die typischerweise in eng stehenden Reihen gepflanzt werden) bieten satellitengestützte Navigationssysteme nicht die erforderliche Auflösung. Harvest CROO gibt beispielsweise an, dass sein System auf Lidar setzt, um sicherzustellen, dass der Erntehelfer nicht über Pflanzen fährt oder mit menschlichen Arbeitskräften und anderen Hindernissen kollidiert.
Es werden verschiedene Manipulatoren eingesetzt, darunter mechanische Klammern, Sauger, Anzieher, Nadeln, Sprühdüsen und Scheren, um Funktionen wie Pflücken, Ernten, Sprühen, Säen und Umpflanzen auszuführen.
Diese Manipulatoren enthalten eine breite Palette von Aktuatoren, darunter magnetostrikive, piezoelektrische, pneumatische, elektrostatische, Formgedächtnislegierungen, Ultraschall- und sogar optische Aktuatoren.
Agrarroboter verlassen sich hauptsächlich auf maschinelles Sehen, aber auch andere Sensoren kommen zum Einsatz. Kraftsensoren gelten als geeignet für Maschinen, die Klammern zum Ernten von Früchten mit großem Volumen und Gewicht verwenden (daraus folgt, dass dies Kulturen wie Äpfel und Melonen einschließt). Spektralbildgebung könnte zur Verbesserung der Erkennung, Lokalisierungsgenauigkeit und Präzision der Ernte eingesetzt werden.
Gartenbauliche Roboter bieten gegenüber menschlichen Arbeitskräften einen entscheidenden Vorteil: ihre Fähigkeit, Daten für die spätere Analyse zu sammeln. Diese Geräte können präzise Daten über die Menge der gepflückten Früchte sowie das Gewicht und die Größe jeder Frucht liefern, komplett mit Zeitstempeln und Geolokalisierung. Sie können Farbklassifizierungen durchführen und Informationen über die Verteilung von Gewicht, Größe und Farben verschiedener Früchte in einzelnen Sortierbehältern bereitstellen. Sie können Makel, Krankheiten und Schädlinge erkennen, nicht nur an den essbaren Teilen, die geerntet werden, sondern auch am zugehörigen Laub.

Abbildung 4. Konzept der automatisierten Ernte. Bild mit freundlicher Genehmigung von Adobe Stock
Der heutige Markt für Agrarrobotik
Der Gesamtmarkt für Agrarroboter wurde für 2023 auf 13,5 Milliarden US-Dollar geschätzt und soll bis 2028 auf 40,1 Milliarden US-Dollar wachsen, so MarketsAndMarkets. Die Schätzung umfasst eine Vielzahl von Systemen, die pflügen, säen und ernten sowie Pflanzenüberwachung und Bodenanalyse bieten. Ebenfalls enthalten sind neue Systeme zur Automatisierung des Melkens von Kühen; Milchbauern sind ebenso an Automatisierung interessiert wie Obst- und Gemüsebauer.
Die meisten gartenbaulichen Roboter, die speziell für Obst und Gemüse entwickelt wurden, kommen erst jetzt auf den Markt, oft für Demonstrationsprojekte auf kommerziellen Farmen. Viele weitere gartenbauliche Roboter werden entwickelt. Selbst mit den neuesten Sensoren, Aktuatoren und KI ist die Ernte von Obst und Gemüse eine Herausforderung.
„[F]ruchtpflückroboter benötigen noch Entwicklung in den Bereichen Sensorik, Manipulation und Softrobotik“, so MarketsAndMarkets. „Ein typischer Fruchtpflückroboter kostet zwischen 250.000 und 750.000 USD, was ihn für die meisten Landwirte unerschwinglich macht.“
Dennoch ist das Interesse der Landwirte, automatisierte Systeme auf ihren Feldern einzusetzen, groß. MarketsAndMarkets erwartet, dass fahrerlose Traktoren und Drohnen ab 2025 wahrscheinlich alltäglich werden.