




برجسته در مزرعه: رباتهایی که میتوانند میوه بچینند
Manufacturers face increasing pressure to reduce emissions, improve energy efficiency, and meet sustainability goals while maintaining productivity and profitability. This article explores the bigg...
آیا جرات میکنم یک هلو بچینم؟
– با پوزش از تی. اس. الیوت
رباتهای باغبانی در حال ورود برای رسیدگی به حساسترین محصولات هستند. تولیدکنندگان تجهیزات از پیشرفتهای اخیر در حسگرها، هوش مصنوعی (AI) و رباتیک بهره میبرند تا سیستمهای خودکار بسازند که قادر به شناسایی میوهها و سبزیجات خاص، تشخیص تفاوت بین نمونههای نارس و رسیده، و به آرامی چیدن و بستهبندی تنها آنهایی که آماده برداشت هستند، باشند.
تاریخچهای پیوسته: کشاورزی و نوآوری
کشاورزی همواره الهامبخش نوآوریهای فناوری بوده است، از سیستمهای پیشرفته آبیاری که ۵۰۰۰ سال پیش در بینالنهرین ساخته شدند، تا دستگاه کاشت بذر که ۲۰۰۰ سال پیش در چین اختراع شد، تا دستگاه پنبهپاککنی که نسبتاً اخیراً (در سال ۱۷۹۴) در ایالات متحده ثبت اختراع شد.
در چند سال اخیر، بسیاری از پیشرفتهای قابل توجه در فناوری کشاورزی شامل ماشینهای خودران بودهاند. وسایل نقلیه خودگردان برای شخم زدن زمین، کاشت بذر، نظارت بر رشد گیاه و استفاده از سموم به کار رفتهاند.
همچنین برای برداشت محصولات، عمدتاً غلاتی مانند گندم، ذرت و برنج، و همچنین سویا و پنبه استفاده شدهاند. این محصولات همیشه به اندازه کافی مقاوم بودهاند تا در برابر برخوردهای خشن حتی برخی از ابتداییترین و سادهترین ماشینهای کشاورزی دوام بیاورند.
اما محصولات حساستر، مانند میوههای هستهدار (مثلاً هلو، آلو، زردآلو)، گوجهفرنگی و توتفرنگی، به آسانی آسیب میبینند. حتی کارگران باتجربه مزرعه ممکن است با لحظهای بیدقتی یک سیب را کبود یا یک توت را له کنند.

شکل ۱. مفهوم برداشت خودکار. تصویر با اجازه از Adobe Stock
ساخت ماشینی که بتواند سرعت، چابکی و لمس ماهرانه یک کارگر باتجربه مزرعه را داشته باشد، چالشی بزرگ است، اما شرایط این موضوع را اجتنابناپذیر کرده است.
پاسخ به بازار کار دشوار
حداقل در دو دهه گذشته، کشاورزان سراسر جهان از دشواری یافتن نیروی کار ماهر شکایت داشتهاند. طبق گزارشی در سال ۲۰۲۳ از شرکت تحقیقاتی Markets And Markets، «حتی در مراکز کشاورزی، مثلاً کالیفرنیا، جایی که دستمزدهای مزرعه گاهی به بیش از ۲۰ دلار در ساعت میرسد، دستمزدهای بالا مردم را به انجام کارهای فیزیکی سخت و تکراری، مانند چیدن توت، تشویق نمیکند.»
کمبود نیروی کار کشاورزی با مسائل سیاسی تشدید شده است. اغلب ماهرترین کارگران مزرعه مهاجران هستند، اما بسیاری از کشورهایی که قبلاً کار فصلی در آنها انجام میدادند، قوانین مهاجرت و تجارت را به گونهای وضع کردهاند که حرکت بینالمللی نیروی کار را محدود یا حتی ممنوع میکند.
ایالت جورجیا در آمریکا در سال ۲۰۱۱ قانون سختگیرانه ضد مهاجرت تصویب کرد؛ جورجیا در آن سال کمبود ۱۱۰۰۰ کارگر را گزارش داد و کشاورزان محلی بیش از ۱۲۰ میلیون دلار در آن برداشت ضرر کردند. بریتانیا نیز به دلیل برگزیت خدمات ۳۳۰۰۰۰ کارگر ماهر مزرعه را از دست داد.
کشاورزان در تأمین نیروی کار در تنگنا هستند و یکی از گزینههای محدود آنها برای ادامه فعالیت، خودکارسازی است. شرکتهای بزرگ مانند John Deere و Komatsu معمولاً تراکتورها و دستگاههای برداشت خودران را برای محصولات عمده پولساز مانند گندم، ذرت، برنج، سویا و پنبه میسازند. سیستمهای رباتیک برای میوهها و سبزیجات کمیاب هستند چون چالش بسیار بزرگی است.
با این حال نیاز شدید است و تعدادی استارتاپ برای توسعه چنین ماشینهایی شکل گرفتهاند. برخی از تولیدکنندگان بزرگ صنعتی در این استارتاپها سرمایهگذاری کردهاند (مثلاً Kubota و Bosch)، اما کشاورزانی که میوه و سبزیجات میکارند نیز سرمایهگذاری میکنند.
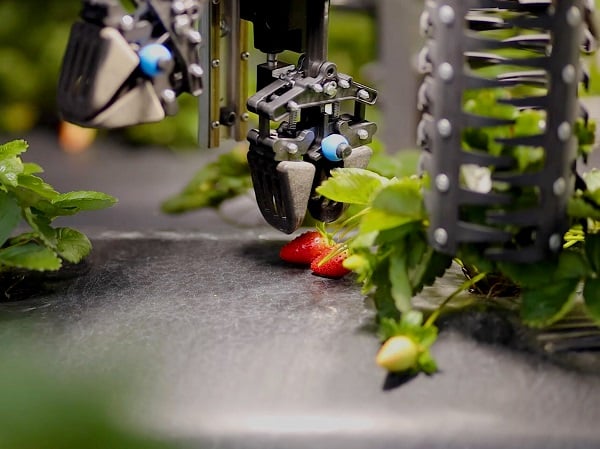
شکل ۲. گیرههایی طراحی شده برای چیدن حساس محصولات به آرامی. تصویر با اجازه از Harvest CROO
معرفی استارتاپها
در ادامه توضیحاتی کوتاه درباره برخی از شرکتهایی که در ۱۰ سال گذشته برای ساخت رباتهای باغبانی تأسیس شدهاند آمده است. این نمونهها نمای کلی از رویکردهای مختلف در استفاده از دستگیرهها و حسگرها را ارائه میدهند.
Harvest CROO
Harvest CROO که در سال ۲۰۱۳ در فلوریدا تأسیس شده، ماژولهای رباتیکی مجهز به دستگیرههای رباتیکی نرم طراحی کرده است. این ماژولها زیر شاسی وسیله نقلیه خودران شرکت نصب میشوند. CROO مخفف computerized robotic optimized obtainer است؛ تصادفی نیست که این مخفف مانند «crew» تلفظ میشود.
Tevel Aerobotics Technologies
Tevel Aerobotics Technologies، که در سال ۲۰۱۷ در اسرائیل تأسیس شده، پهپادهای هوایی طراحی میکند که میوههای درختی مانند سیب، گلابی و انواع میوههای هستهدار را با استفاده از فنجانهای مکنده نصب شده روی بازوهای سبک میچینند. این پهپادها میوهها را از درخت میچرخانند و در بستر یک جمعکننده خودران متصل به آنها قرار میدهند.
Ripe Robotics
Ripe Robotics، مستقر در استرالیا، وسیله نقلیهای به نام Eve توسعه میدهد که مجهز به بازوهای رباتیکی برای چیدن میوههای درختی مانند سیب است. بازوهای Eve نیز با فنجانهای مکنده برای چیدن میوه مجهز شدهاند.
Fieldwork Robotics
Fieldwork Robotics، مستقر در بریتانیا، وسیله نقلیه مشابهی دارد که مجهز به چهار بازوی رباتیکی است که قادر به برداشت برخی از حساسترین میوهها مانند تمشک است. این ربات به آرامی هر توت را در دست میگیرد و ساقه آن را میبرد.
Agrobot
Agrobot، مستقر در اسرائیل، وسیله نقلیه خودران برداشت توتفرنگی ساخته است که بازوهای رباتیکی آن به گیرههایی ختم میشود که برای گرفتن ساقه هر میوه و بریدن آن طراحی شدهاند. هدف این است که دستگیرهها هرگز میوه را لمس نکنند.

شکل ۳. شناسایی و برداشت میوه از سکوی پروازی. تصویر با اجازه از Tevel Aerobotics
فناوریهای مورد استفاده
هر ربات باغبانی از حسگرهای نوری برای حرکت در میان شاخ و برگ گیاهان و یافتن میوه و سپس شناسایی میوه رسیده استفاده میکند. اکثر سیستمهای موجود ادعا میکنند از هوش مصنوعی بهره میبرند که برای ارزیابی سلامت، بدون لکه بودن و رسیدگی میوه به کار میرود.
سیستمهای بینایی کامپیوتری گاهی همراه با رادار، اولتراسونیک و لیدار استفاده میشوند. این حسگرهای اضافی برای یافتن و ارزیابی میوه کاربرد دارند، اما همچنین برای ناوبری نیز به کار میروند. در بسیاری از کاربردهای کشاورزی (مانند چیدن توتهایی که معمولاً در ردیفهای نزدیک به هم کاشته میشوند)، سیستمهای ناوبری ماهوارهای وضوح کافی ندارند. به عنوان مثال، Harvest CROO اعلام کرده است که سیستمش برای جلوگیری از له کردن محصولات یا برخورد با کارگران و موانع دیگر به لیدار متکی است.
انواع مختلفی از دستگیرهها به کار رفتهاند، از جمله گیرههای مکانیکی، دستگاههای مکنده، جاذبها، سوزنها، نازلهای اسپری و قیچی برای انجام وظایفی مانند چیدن، برداشت، سمپاشی، کاشت و انتقال گیاه.
این دستگیرهها از انواع محرکها استفاده میکنند، از جمله محرکهای مغناطیسی، پیزوالکتریک، پنوماتیک، الکترواستاتیک، آلیاژ حافظهدار، اولتراسونیک و حتی محرکهای نوری.
رباتهای کشاورزی عمدتاً به بینایی ماشینی متکی هستند، اما حسگرهای دیگری نیز به کار میروند. حسگرهای نیرو برای ماشینهایی که از گیره برای برداشت میوههای حجیم و سنگین استفاده میکنند (مانند سیب و خربزه) مناسب در نظر گرفته میشوند. تصویربرداری طیفی میتواند برای بهبود شناسایی محصول، دقت مکانیابی و صحت به کار رود.
رباتهای باغبانی در یک جنبه نسبت به کارگران انسانی برتری دارند: توانایی جمعآوری داده برای تحلیلهای بعدی. این دستگاهها میتوانند دادههای دقیقی درباره مقدار میوه چیده شده، وزن و اندازه هر میوه، همراه با زمان و موقعیت جغرافیایی ارائه دهند. آنها میتوانند درجهبندی رنگ انجام دهند و اطلاعاتی درباره توزیع وزن، اندازه و رنگهای مختلف میوهها در سطلهای جداگانه ارائه کنند. همچنین میتوانند لکهها، بیماریها و آفات را نه فقط روی بخشهای خوراکی برداشت شده، بلکه روی شاخ و برگ مرتبط تشخیص دهند.

شکل ۴. مفهوم برداشت خودکار. تصویر با اجازه از Adobe Stock
بازار رباتهای کشاورزی امروز
بازار کلی رباتهای کشاورزی در سال ۲۰۲۳ پیشبینی شده بود که به ۱۳.۵ میلیارد دلار برسد و تا سال ۲۰۲۸ به ۴۰.۱ میلیارد دلار رشد کند، طبق گزارش MarketsAndMarkets. این برآورد شامل انواع سیستمهایی است که زمین را شخم میزنند، بذر میکارند، برداشت میکنند و همچنین نظارت بر گیاه و تحلیل خاک انجام میدهند. همچنین سیستمهای جدیدی که برای خودکارسازی فرآیند دوشیدن گاوها معرفی میشوند را شامل میشود؛ کشاورزان دامداری به اندازه کشاورزان میوه و سبزیجات مشتاق خودکارسازی هستند.
اکثر رباتهای باغبانی طراحی شده مخصوص میوهها و سبزیجات تازه به بازار عرضه شدهاند، اغلب برای پروژههای نمایشی در مزارع تجاری. تعداد بیشتری ربات باغبانی در حال توسعه است. حتی با جدیدترین حسگرها، محرکها و هوش مصنوعی، برداشت میوهها و سبزیجات چالشی است.
طبق MarketsAndMarkets، «رباتهای برداشت میوه هنوز نیاز به توسعه در زمینه حسگری، دستکاری و رباتیک نرم دارند.» «یک ربات برداشت میوه معمولی بین ۲۵۰,۰۰۰ تا ۷۵۰,۰۰۰ دلار هزینه دارد که برای اکثر کشاورزان غیرقابلتحمل است.»
با این حال، علاقه کشاورزان به آوردن سیستمهای خودکار به مزارعشان بالاست. MarketsAndMarkets انتظار دارد تراکتورهای بدون راننده و پهپادها احتمالاً از سال ۲۰۲۵ رایج شوند.