




Destaque no Campo: Robôs Que Podem Colher Frutas
Manufacturers face increasing pressure to reduce emissions, improve energy efficiency, and meet sustainability goals while maintaining productivity and profitability. This article explores the bigg...
Eu ouso colher um pêssego?
– com desculpas a T.S. Eliot
Robôs hortícolas estão chegando para lidar com as culturas mais delicadas. Fabricantes de equipamentos estão aproveitando os avanços recentes em sensores, inteligência artificial (IA) e robótica para criar sistemas autônomos que podem identificar frutas e vegetais específicos, discernir a diferença entre exemplares verdes e maduros, e colher e embalar suavemente apenas aqueles prontos para a colheita.
Uma História Conectada: Agricultura e Inovação
A agricultura tem sido uma inspiração constante para a inovação tecnológica, desde sistemas sofisticados de irrigação criados há 5.000 anos na Mesopotâmia, até um semeador inventado há 2.000 anos na China, e a descaroçadora de algodão patenteada relativamente recentemente (em 1794) nos Estados Unidos.
Nos últimos anos, muitos dos avanços mais notáveis em tecnologia agrícola envolveram máquinas autônomas. Veículos autoguiados têm sido usados para arar terras, semear, monitorar o crescimento das plantas e aplicar pesticidas.
Eles também têm sido usados para colher culturas, predominantemente grãos como trigo, milho e arroz, mas também soja e algodão. Essas culturas sempre foram resistentes o suficiente para suportar o tratamento áspero até mesmo de algumas das primeiras e mais rudimentares máquinas agrícolas.
Culturas mais delicadas, como frutas de caroço (ex.: pêssegos, ameixas, damascos), tomates e morangos, por outro lado, são facilmente danificadas. Mesmo trabalhadores agrícolas experientes podem machucar uma maçã ou esmagar uma fruta com um breve momento de desajeitamento.

Figura 1. Conceito de colheita automatizada. Imagem cortesia de Adobe Stock
Fazer uma máquina que possa igualar a velocidade, destreza e toque experiente de um trabalhador agrícola é um desafio formidável, mas as circunstâncias estão forçando essa questão.
Enfrentando um Mercado de Trabalho Difícil
Há pelo menos duas décadas, agricultores ao redor do mundo têm reclamado da dificuldade em encontrar mão de obra qualificada. "Mesmo em centros agrícolas, por exemplo, na Califórnia, onde os salários agrícolas às vezes ultrapassam USD 20 por hora, os altos salários não estão incentivando as pessoas a realizar tarefas fisicamente exigentes e repetitivas, como a colheita de frutas vermelhas,” segundo um relatório de 2023 da empresa de pesquisa Markets And Markets.
A escassez de mão de obra agrícola foi agravada pela política. Frequentemente, os trabalhadores agrícolas mais experientes são migrantes, mas muitos dos países onde costumavam encontrar trabalho sazonal adotaram leis de imigração e comércio que desencorajam o movimento internacional de mão de obra, se não o restringem completamente.
O estado da Geórgia, nos EUA, aprovou uma lei rigorosa anti-imigração em 2011; a Geórgia relatou uma falta de 11.000 trabalhadores naquele ano e os agricultores locais perderam mais de 120 milhões de dólares na colheita. O Reino Unido relatou a perda dos serviços de 330.000 trabalhadores agrícolas experientes devido ao Brexit.
Os agricultores estão em um impasse quanto à mão de obra, e uma das poucas opções para continuar no negócio é automatizar. Grandes empresas como John Deere e Komatsu tendem a fabricar tratores e colheitadeiras autônomas para as culturas comerciais mais amplamente cultivadas: trigo, milho, arroz, soja e algodão. Sistemas robóticos para frutas e vegetais são escassos porque o desafio tem sido tão formidável.
No entanto, a necessidade é aguda, e várias startups foram formadas para desenvolver essas máquinas. Alguns dos grandes fabricantes industriais estão investindo em algumas dessas startups (Kubota e Bosch, por exemplo), mas agricultores que cultivam frutas e vegetais também estão investindo.
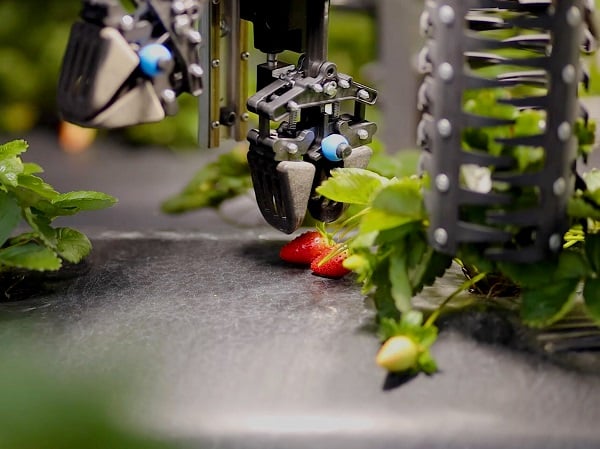
Figura 2. Pinças projetadas para colher delicadamente culturas sensíveis. Imagem cortesia de Harvest CROO
Perfis de Startups
A seguir, descrições breves de algumas das empresas fundadas nos últimos 10 anos para construir robôs hortícolas. Os exemplos fornecem uma visão geral da variedade de abordagens adotadas com manipuladores e sensores.
Harvest CROO
A Harvest CROO, fundada em 2013 na Flórida, projetou módulos robóticos equipados com manipuladores – grampos robóticos acolchoados. Os módulos são montados sob o chassi do veículo autônomo da empresa. CROO significa computerized robotic optimized obtainer; não é coincidência que a sigla seja pronunciada como “crew”.
Tevel Aerobotics Technologies
A Tevel Aerobotics Technologies, fundada em 2017 e sediada em Israel, fabrica drones aéreos projetados para colher frutas cultivadas em árvores, incluindo maçãs, peras e várias frutas de caroço, usando ventosas montadas em braços leves. Os drones torcem as frutas das árvores e as colocam na plataforma de um coletor móvel autônomo ao qual estão presos.
Ripe Robotics
A Ripe Robotics, sediada na Austrália, está desenvolvendo um veículo chamado Eve, equipado com braços robóticos para colher frutas de árvores, como maçãs. Os braços de Eve são igualmente equipados com ventosas para colher frutas.
Fieldwork Robotics
A Fieldwork Robotics, sediada no Reino Unido, tem um veículo similar equipado com quatro braços robóticos capazes de colher algumas das frutas mais delicadas cultivadas – framboesas. O veículo robótico cuidadosamente envolve cada framboesa individual e corta seu caule.
Agrobot
A Agrobot, sediada em Israel, criou um veículo autônomo para colheita de morangos equipado com braços robóticos que terminam em pinças projetadas para agarrar os caules de cada fruta e cortá-los. O objetivo é evitar que os manipuladores toquem diretamente na fruta.

Figura 3. Identificando e colhendo frutas a partir de uma plataforma voadora. Imagem cortesia de Tevel Aerobotics
Tecnologia Habilitadora
Todo robô hortícola emprega sensores ópticos para primeiro navegar pela folhagem das plantas para encontrar a fruta, e depois para identificar frutas maduras. A maioria dos sistemas existentes afirma usar IA, que dizem ser usada para avaliar se uma planta está inteira, sem manchas e pronta para a colheita.
Sistemas de visão computacional são às vezes usados em conjunto com radar, ultrassom e lidar. Esses sensores adicionais podem ser usados para encontrar e avaliar frutas, claro, mas também são usados para navegação. Em muitos casos agrícolas (como na colheita de frutas vermelhas plantadas em fileiras próximas), sistemas de navegação baseados em satélite não fornecem resolução suficiente. A Harvest CROO, por exemplo, afirma que seu sistema depende de lidar para garantir que sua colheitadeira evite passar por cima das culturas ou colidir com trabalhadores humanos e outros obstáculos.
Uma variedade de manipuladores foi adotada, incluindo grampos mecânicos, dispositivos de sucção, atratores, agulhas, bicos de spray e tesouras para realizar funções que incluem colher, colher, pulverizar, semear e transplantar.
Esses manipuladores incorporam uma ampla gama de atuadores, incluindo magnetostrictivos, piezoelétricos, pneumáticos, eletrostáticos, ligas com memória de forma, ultrassônicos e até atuadores ópticos.
Robôs agrícolas dependem principalmente da visão de máquina, mas outros sensores são empregados. Sensores de força são considerados apropriados para máquinas que usam grampos para colher frutas de grande volume e peso (por inferência, isso incluiria culturas como maçãs e melões). Imagens espectrais poderiam ser usadas para melhorar o reconhecimento da cultura, a precisão da localização e a precisão.
Robôs hortícolas oferecem uma vantagem sobre trabalhadores humanos em um aspecto chave: sua capacidade de coletar dados para análise posterior. Esses dispositivos podem fornecer dados precisos sobre a quantidade de fruta colhida, bem como o peso e tamanho de cada fruta, completos com carimbos de tempo e geolocalização. Podem realizar classificação por cor e fornecer informações sobre a distribuição de peso, tamanho e cores de várias frutas em caixas de triagem individuais. Podem detectar manchas, doenças e pragas, não apenas nas partes comestíveis colhidas, mas também na folhagem associada.

Figura 4. Conceito de colheita automatizada. Imagem cortesia de Adobe Stock
O Mercado Atual de Robótica Agrícola
O mercado geral para robôs agrícolas foi projetado para alcançar US$ 13,5 bilhões em 2023 e crescer para US$ 40,1 bilhões até 2028, segundo a MarketsAndMarkets. A estimativa inclui uma variedade de sistemas que aram, semeiam e colhem, além de fornecer monitoramento de plantas e análise do solo. Também inclui novos sistemas sendo introduzidos para automatizar o processo de ordenha de vacas; os produtores de laticínios estão tão interessados em automatizar quanto os produtores de frutas e vegetais.
A maioria dos robôs hortícolas projetados especificamente para frutas e vegetais está apenas agora chegando ao mercado, muitas vezes para projetos de demonstração em fazendas comerciais. Muitos mais robôs hortícolas estão sendo desenvolvidos. Mesmo com os sensores, atuadores e IA mais recentes, colher frutas e vegetais é um desafio.
“[R]obôs de colheita de frutas ainda requerem desenvolvimento em sensoriamento, manipulação e robótica suave,” segundo a MarketsAndMarkets. “Um robô típico de colheita de frutas custa entre USD 250.000 e USD 750.000, tornando-o inacessível para a maioria dos agricultores."
Ainda assim, o interesse dos agricultores em colocar sistemas automatizados em seus campos é alto. A MarketsAndMarkets espera que tratores e drones autônomos provavelmente se tornem comuns a partir de 2025.