




متميزون في الحقل: الروبوتات التي يمكنها قطف الفاكهة
Manufacturers face increasing pressure to reduce emissions, improve energy efficiency, and meet sustainability goals while maintaining productivity and profitability. This article explores the bigg...
هل أتجرأ على قطف خوخة؟
– مع اعتذاري لـ ت. س. إليوت
تصل الروبوتات الزراعية للتعامل مع المحاصيل الأكثر حساسية. يستفيد مصنعو المعدات من التقدمات الحديثة في أجهزة الاستشعار والذكاء الاصطناعي (AI) والروبوتات لإنشاء أنظمة مستقلة يمكنها التعرف على الفواكه والخضروات المحددة، وتمييز الفرق بين الأمثلة غير الناضجة والناضجة، وقطف وتعبئة فقط تلك الجاهزة للحصاد بلطف.
تاريخ مرتبط: الزراعة والابتكار
كانت الزراعة مصدر إلهام دائم للابتكار التكنولوجي، من أنظمة الري المتطورة التي أُنشئت قبل 5000 عام في بلاد ما بين النهرين، إلى آلة زرع البذور التي اخترعت قبل 2000 عام في الصين، إلى آلة فصل القطن التي تم تسجيل براءة اختراعها مؤخرًا نسبيًا (في عام 1794) في الولايات المتحدة.
في السنوات القليلة الماضية، شملت العديد من أبرز التقدمات في تكنولوجيا الزراعة آلات مستقلة. تم استخدام مركبات ذاتية التوجيه لحرث الأراضي الزراعية، وزرع البذور، ومراقبة نمو النباتات، وتطبيق المبيدات.
كما تم استخدامها لحصاد المحاصيل، وخاصة الحبوب مثل القمح والذرة والأرز، وكذلك فول الصويا والقطن. كانت هذه المحاصيل دائمًا قوية بما يكفي لتحمل المعاملة الخشنة حتى من بعض أقدم وأبسط الآلات الزراعية.
أما المحاصيل الأكثر حساسية، مثل الفواكه الحجرية (مثل الخوخ، والبرقوق، والمشمش)، والطماطم، والفراولة، فهي تتلف بسهولة. حتى العمال الزراعيون المتمرسون قد يتسببون في كدمات على التفاح أو سحق التوت بلحظة من عدم الحذر.

الشكل 1. مفهوم الحصاد الآلي. الصورة بإذن من Adobe Stock
إن صنع آلة يمكنها مجاراة سرعة ومهارة ولمسة عامل مزرعة متمرس هو تحدٍ هائل، لكن الظروف تجبر على ذلك.
مواجهة سوق عمل صعب
على الأقل خلال العقدين الماضيين، يشكو المزارعون حول العالم من صعوبة العثور على عمالة مؤهلة. "حتى في مراكز الزراعة، مثل كاليفورنيا، حيث قد تتجاوز أجور العمال الزراعيين أحيانًا 20 دولارًا في الساعة، لا تشجع الأجور العالية الناس على أداء المهام البدنية المتعبة والمتكررة، مثل قطف التوت"، وفقًا لتقرير عام 2023 من شركة الأبحاث Markets And Markets.
تفاقمت نقص العمالة الزراعية بسبب السياسة. غالبًا ما يكون أكثر العمال خبرة من العمال المهاجرين، لكن العديد من الدول التي كانوا يجدون فيها عملًا موسميًا اعتمدت قوانين هجرة وتجارية تثبط حركة العمالة الدولية، إن لم تكن تقيدها تمامًا.
أصدرت ولاية جورجيا في الولايات المتحدة قانونًا صارمًا ضد الهجرة في 2011؛ وأبلغت جورجيا عن نقص 11,000 عامل في ذلك العام وخسر المزارعون المحليون أكثر من 120 مليون دولار في ذلك الحصاد. وأبلغت المملكة المتحدة عن فقدان خدمات 330,000 عامل مزرعة متمرس بسبب البريكست.
يقع المزارعون في مأزق من حيث العمالة، وأحد خياراتهم القليلة للبقاء في العمل هو الأتمتة. تميل الشركات الكبرى مثل John Deere وKomatsu إلى صنع الجرارات والحصادات المستقلة للمحاصيل النقدية الأكثر زراعة: القمح، والذرة، والأرز، وفول الصويا، والقطن. أنظمة الروبوتات للفواكه والخضروات نادرة لأن التحدي كان هائلًا.
ومع ذلك، الحاجة ملحة، وقد تأسست عدة شركات ناشئة لتطوير مثل هذه الآلات. بعض الشركات الصناعية الكبرى تستثمر في بعض هذه الشركات الناشئة (مثل Kubota وBosch)، لكن المزارعين الذين يزرعون الفواكه والخضروات يستثمرون أيضًا.
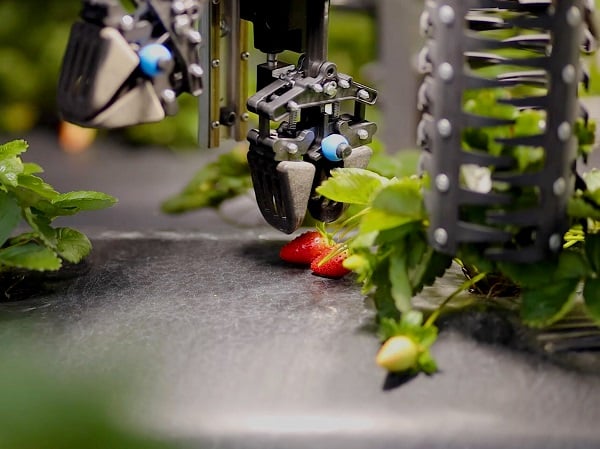
الشكل 2. مقابض مصممة لقطف المحاصيل الحساسة بلطف. الصورة بإذن من Harvest CROO
ملامح الشركات الناشئة
فيما يلي أوصاف موجزة لبعض الشركات التي تأسست خلال العشر سنوات الماضية لبناء روبوتات زراعية. تقدم الأمثلة نظرة عامة على نطاق الأساليب المتبعة مع المحركات وأجهزة الاستشعار.
Harvest CROO
تأسست Harvest CROO في 2013 في فلوريدا، وصممت وحدات روبوتية مزودة بمحركات – مشابك روبوتية مبطنة. تُركب الوحدات تحت هيكل مركبة الشركة المستقلة. CROO تعني "الحاصل المحسن المحوسب بالروبوت"؛ وليس من قبيل الصدفة أن يُنطق الاختصار مثل كلمة "طاقم".
Tevel Aerobotics Technologies
تأسست Tevel Aerobotics Technologies في 2017 ومقرها في إسرائيل، تصنع طائرات بدون طيار جوية مصممة لقطف الفواكه المزروعة على الأشجار، بما في ذلك التفاح والكمثرى وأنواع مختلفة من الفواكه الحجرية، باستخدام أكواب شفط مركبة على أذرع خفيفة. تقوم الطائرات بلف الفواكه من الأشجار وتضعها في حوض جامع متنقل مستقل مرتبط بها.
Ripe Robotics
تعمل Ripe Robotics، ومقرها أستراليا، على تطوير مركبة تسمى Eve، مزودة بأذرع روبوتية لقطف الفواكه التي تنمو على الأشجار، مثل التفاح. أذرع Eve مجهزة أيضًا بأكواب شفط لقطف الفاكهة.
Fieldwork Robotics
تملك Fieldwork Robotics، ومقرها المملكة المتحدة، مركبة مماثلة مزودة بأربعة أذرع روبوتية قادرة على حصاد بعض الفواكه الأكثر حساسية المزروعة – مثل توت العليق. تقوم المركبة الروبوتية بحمل كل توت بعناية وتقطيع ساقه.
Agrobot
أنشأت Agrobot، ومقرها إسرائيل، مركبة حصاد فراولة مستقلة مزودة بأذرع روبوتية تنتهي بملاقط مصممة للإمساك بسيقان كل ثمرة وقطعها. الهدف هو تجنب لمس المحركات للفاكهة نفسها.

الشكل 3. التعرف على الفاكهة وقطفها من منصة طائرة. الصورة بإذن من Tevel Aerobotics
التقنية الممكنة
يستخدم كل روبوت زراعي أجهزة استشعار بصرية أولاً للتنقل عبر أوراق النباتات للعثور على الفاكهة، ثم لتحديد الفاكهة الناضجة. تدعي معظم الأنظمة الحالية استخدام الذكاء الاصطناعي، الذي يُستخدم لتقييم ما إذا كانت النبتة كاملة، وخالية من العيوب، وناضجة للقطف.
تُستخدم أنظمة الرؤية الحاسوبية أحيانًا مع الرادار، والموجات فوق الصوتية، والليدار. يمكن استخدام هذه الحساسات الإضافية للعثور على الفاكهة وتقييمها، وبالطبع تُعتمد أيضًا للملاحة. في العديد من حالات الاستخدام الزراعي (مثل قطف التوت المزروع عادة في صفوف متقاربة)، لا توفر أنظمة الملاحة القائمة على الأقمار الصناعية دقة كافية. على سبيل المثال، توضح Harvest CROO أن نظامها يعتمد على الليدار لضمان تجنب الحصادة الدحرجة فوق المحاصيل أو الاصطدام بالعمال البشر والعقبات الأخرى.
تم اعتماد مجموعة متنوعة من المحركات، بما في ذلك المشابك الميكانيكية، وأجهزة الشفط، وأجهزة الجذب، والإبر، وفوهات الرش، والمقصات لأداء وظائف تشمل القطف، والحصاد، والرش، والزراعة، وإعادة الزرع.
تدمج هذه المحركات مجموعة واسعة من المشغلات، بما في ذلك المشغلات المغناطيسية الانضغاطية، والكهروضغطية، والهوائية، والكهروستاتيكية، وسبائك الذاكرة الشكلية، والموجات فوق الصوتية، وحتى المشغلات البصرية.
تعتمد الروبوتات الزراعية بشكل أساسي على الرؤية الحاسوبية، لكن تُستخدم حساسات أخرى. تُعتبر حساسات القوة مناسبة للآلات التي تستخدم المشابك لحصاد الفواكه ذات الحجم والوزن الكبير (وبالاستدلال، يشمل ذلك محاصيل مثل التفاح والبطيخ). يمكن استخدام التصوير الطيفي لتحسين التعرف على المحاصيل، ودقة التموقع، والدقة.
قدمت الروبوتات الزراعية ميزة على العمال البشر في جانب رئيسي واحد: قدرتها على جمع البيانات للتحليل اللاحق. يمكن لهذه الأجهزة توفير بيانات دقيقة عن كمية الفاكهة المقطوفة، بالإضافة إلى وزن وحجم كل ثمرة، مع طوابع زمنية وموقع جغرافي. يمكنها إجراء تصنيف لوني، وتوفير معلومات عن توزيع الوزن والحجم والألوان لمختلف الفواكه في صناديق الفرز الفردية. يمكنها اكتشاف العيوب، والأمراض، والآفات، ليس فقط على الأجزاء الصالحة للأكل التي يتم حصادها، بل على الأوراق المرتبطة بها أيضًا.

الشكل 4. مفهوم الحصاد الآلي. الصورة بإذن من Adobe Stock
سوق الروبوتات الزراعية اليوم
كان من المتوقع أن يصل السوق الإجمالي للروبوتات الزراعية إلى 13.5 مليار دولار في 2023 وينمو إلى 40.1 مليار دولار بحلول 2028، وفقًا لـ MarketsAndMarkets. يشمل التقدير مجموعة متنوعة من الأنظمة التي تزرع، وتحصد، وتراقب النباتات، وتحلل التربة. كما يشمل أنظمة جديدة تُقدم لأتمتة عملية حلب الأبقار؛ حيث يحرص مزارعو الألبان على الأتمتة بقدر حرص مزارعي الفواكه والخضروات.
معظم الروبوتات الزراعية المصممة خصيصًا للفواكه والخضروات بدأت تصل إلى السوق الآن، غالبًا لمشاريع عرض في مزارع تجارية. يتم تطوير المزيد من الروبوتات الزراعية. حتى مع أحدث أجهزة الاستشعار، والمحركات، والذكاء الاصطناعي، يظل حصاد الفواكه والخضروات تحديًا.
“[ت]حتاج روبوتات قطف الفواكه إلى مزيد من التطوير في الاستشعار، والمعالجة، والروبوتات اللينة”، وفقًا لـ MarketsAndMarkets. “تكلفة روبوت حصاد الفواكه النموذجي تتراوح بين 250,000 و750,000 دولار أمريكي، مما يجعله غير ميسور التكلفة لمعظم المزارعين."
ومع ذلك، فإن اهتمام المزارعين بالحصول على أنظمة آلية في حقولهم مرتفع. تتوقع MarketsAndMarkets أن تصبح الجرارات والطائرات بدون طيار ذاتية القيادة شائعة بدءًا من 2025.