Description
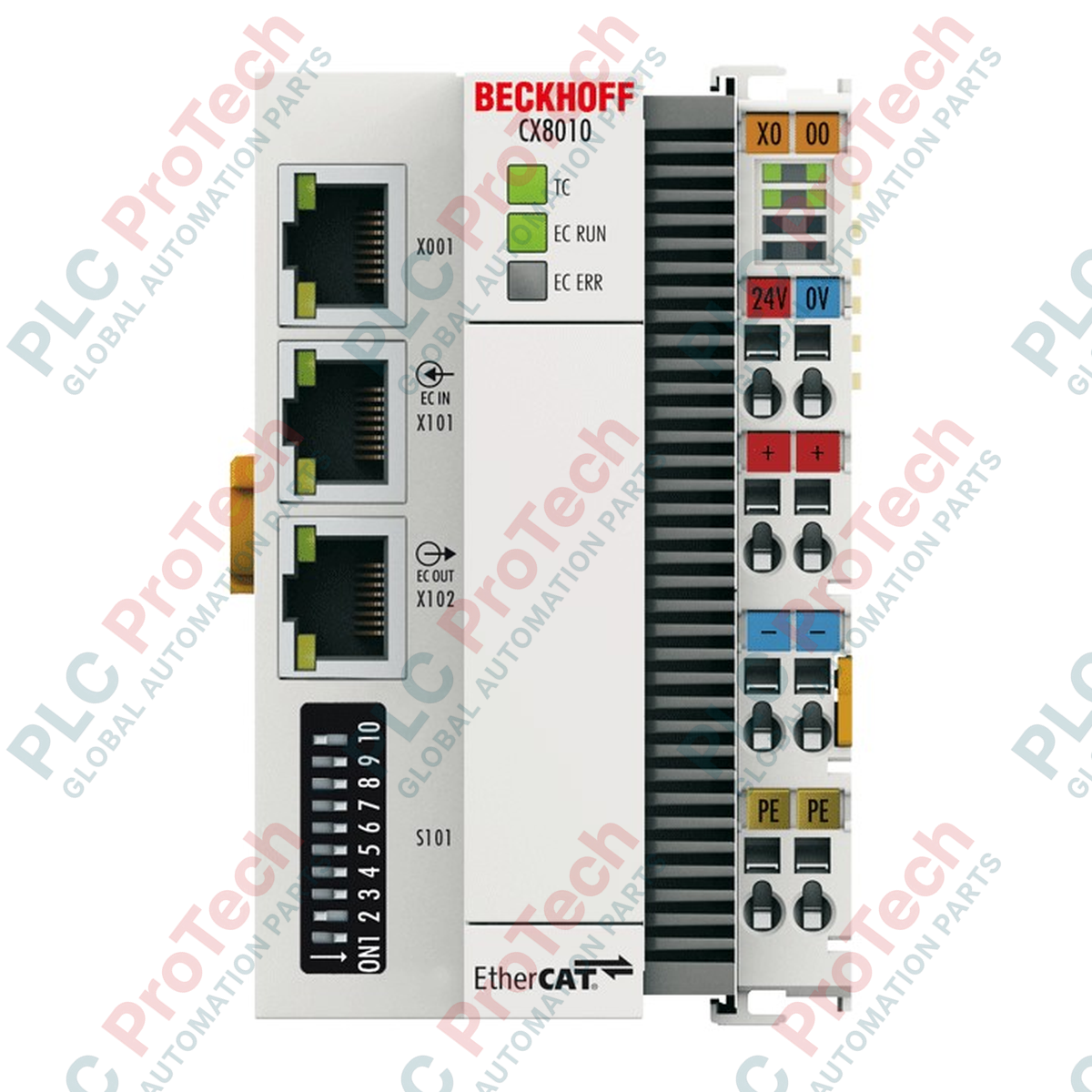
Directing decentralized execution tasks within real-time automation topologies is the primary function of the Beckhoff CX8010. This compact, DIN-rail-mounted control unit integrates an ARM9 400 MHz processor with a specialized EtherCAT slave interface, permitting seamless integration as a high-performance decentralized node under a primary EtherCAT master. Operating on the Windows Embedded CE 6 operating system, the controller uses the TwinCAT 2 PLC software environment to execute deterministic control loops, processing local logic while maintaining cyclic communication over its physical interfaces. Built-in, automatic terminal detection accommodates either E-bus or K-bus I/O architectures, allowing engineers to scale localized signal acquisition without external adapter hardware.
Key Features
-
Dual Bus Support: Automatic sensing and management of Beckhoff E-bus (EtherCAT) and K-bus (standard bus terminal) components.
-
Integrated UPS: Capable of supplying power for 1 second to write up to 1 MB of persistent data to the non-volatile storage during a voltage sag.
-
Deterministic Processing: ARM9 core design running at 400 MHz optimized for low-overhead PLC logic execution under IEC 61131-3 standards.
-
Flexible Storage Options: External microSD slot supporting memory expansion beyond the default 512 MB configuration.
-
Comprehensive Ex Ratings: Engineered for hazardous locations with ATEX, IECEx, and cFMus Class I Division 2 certification.
Applications
-
Decentralized Processing Nodes: Distributed control architectures where independent, local decisions must be synchronized with a centralized master controller.
-
Substation Protocol Conversion: Bridging operational localized I/O nodes with high-level plant monitoring via the integrated 10/100 Mbit/s Ethernet port.
-
OEM Modular Machinery: Packaging, assembly, and conveyor subsystems requiring dedicated local computing, small physical footprints, and direct DIN-rail installation.
Technical Specifications
| Parameter |
Specification |
| Manufacturer |
Beckhoff Automation |
| Model Number |
CX8010 |
| Processor |
ARM9, 400 MHz, 1 Core |
| Flash Memory |
512 MB microSD (expandable) |
| Main Memory |
64 MB DDR2 RAM (non-expandable) |
| Persistent Memory |
1-second UPS (retains 1 MB persistent data) |
| Operating System |
Windows Embedded CE 6 |
| Control Software |
TwinCAT 2 PLC runtime |
| Fieldbus Interface |
EtherCAT IN & OUT (2 x RJ45) |
| Local I/O Capacity |
E-bus or K-bus automatic detection (up to 2 A power supply) |
| Maximum Power Consumption |
3 W |
| Dimensions (W x H x D) |
64 mm x 100 mm x 73 mm |
| Environmental Temperature |
Operating: 0 to 55 degC | Storage: -25 to 85 degC |
| Relative Humidity |
95% non-condensing |
| Protection Rating |
IP20 |
| Ex Markings |
ATEX II 3 G Ex nA IIC T4 Gc / IECEx Ex nA IIC T4 Gc / cFMus Cl. I Div. 2 |
| Shipping Weight (Calculated) |
2.0 kg |
Connections and Interfaces
| Port / Physical Interface |
Technical Assignment & Function |
| 1 x RJ45 (Ethernet) |
10/100 Mbit/s Network link for system programming, visualization, and host connectivity. |
| 2 x RJ45 (EtherCAT) |
Dedicated EtherCAT IN and OUT ports configured to act as an EtherCAT slave interface. |
| 1 x USB Device |
Service-only USB connection positioned securely behind the front access panel. |
| I/O Bus Contact Slide |
Mechanical logic interface feeding power and data channels to connected E-bus or K-bus terminals. |
Alternative Models & Compatibility
The CX8010 is specifically tailored as an EtherCAT slave. If your system design requires protocol mastership or communication over alternative industrial standards, consider the CX8090 (Ethernet/IP / Modbus TCP) or the CX8031 (PROFIBUS slave). Due to the hardware architecture running Windows CE 6, the CX8010 is not compatible with TwinCAT 3 runtime projects. Existing TwinCAT 2 software platforms must be utilized for compilation and program download.
Application Pitfalls & Engineering Notes
Ensure that the total power demand of the attached slice terminals does not exceed the 2 A current supply limit of the internal E-bus/K-bus power contacts. When designing dense terminal assemblies, utilize specialized power supply terminals (such as the EL9410) to inject additional current. The 1-second persistent data UPS is capacitive-based and relies on an internal charge cycle. If consecutive power loss cycles occur within rapid succession, the capacitor will not have recharged sufficiently to complete a secure write operation to the microSD card.
Commissioning & Wiring Tips
To maintain signal integrity on the EtherCAT line, use shielded Cat5e SF/UTP cables grounded directly at the panel penetrations. Ensure that the DIN rail has a direct, low-resistance ground path. At initial power-up, the CX8010 scans the physical Bus Terminal backplane. Do not mix K-bus and E-bus terminals within the same mechanical group, as the system will fault during the auto-detection phase. Always ensure the front protective flap is fully closed during operational runs to maintain the IP20 environmental rating and prevent contamination of the battery compartment.
Installation Guidelines
CRITICAL WARNING
Isolate all electrical power sources prior to mounting, disassembling, or wiring the controller. Failure to disconnect high-voltage systems can lead to structural damage to the CPU logic cards, terminal failure, or electrical shock. Confirm that all local safety standards are respected before energizing the device.
1
Mount the CX8010 vertically on standard 35 mm DIN rail (EN 60715) with the release tab pointing downward.
2
Slide local I/O terminals (E-bus or K-bus) onto the right-hand connection point until the mechanical lock clicks home.
3
Connect the 24V DC auxiliary power supply to the terminals on the integrated power supply module.
4
Connect network cables to the EtherCAT slave ports (IN/OUT) and complete initialization via TwinCAT System Manager.