Diseñado para control de movimiento preciso y tareas de posicionamiento dinámico en entornos industriales automatizados, el Lenze EVS9323-EP funciona como un controlador de posición servo de alto rendimiento dentro de la familia Serie 9300. Esta unidad se integra perfectamente en arquitecturas de control centralizadas o descentralizadas, proporcionando un control robusto en lazo cerrado para motores servo AC síncronos y asíncronos. Diseñado con un grado de protección IP20, está optimizado para instalación vertical dentro de armarios eléctricos protegidos, asegurando una gestión térmica confiable y estabilidad operativa a largo plazo en procesos de fabricación exigentes.
Características clave
-
Control de posicionamiento integrado: Generadores de perfiles y registros de posición incorporados que soportan perfiles de movimiento complejos, carreras de referencia y secuencias de posicionamiento objetivo sin requerir módulos PLC externos de alta velocidad.
-
Interfaz de bus del sistema: Integración nativa del bus de sistema CAN que permite comunicación de alta velocidad entre múltiples accionamientos, controladores y sistemas HMI supervisores.
-
Soporte flexible de retroalimentación: Compatible con sistemas estándar de resolvers y codificadores de alta resolución para retroalimentación precisa de velocidad y posición.
-
Gestión térmica: Diseñado para montaje vertical con geometría optimizada del disipador para facilitar una refrigeración eficiente por convección natural o forzada.
-
Expansión modular: Soporta módulos de comunicación enchufables (AIF) para integración en PROFIBUS, Interbus u otras redes industriales de campo.
Aplicaciones
-
Maquinaria de embalaje: Indexado de alta velocidad, cortadores rotativos y sistemas de engranajes electrónicos.
-
Manipulación de materiales: Sistemas automatizados de almacenamiento y recuperación (ASRS), grúas puente y carros de transferencia de alta velocidad.
-
Montaje y robótica: Sistemas multi-eje de pick-and-place, robots cartesianos y mesas indexadoras rotativas precisas.
-
Procesamiento textil: Bobinado controlado por tensión, desenrollado y control sincronizado del eje de alimentación.
Especificaciones técnicas
| Parámetro |
Valor / Especificación |
| Fabricante |
Lenze |
| Número de modelo |
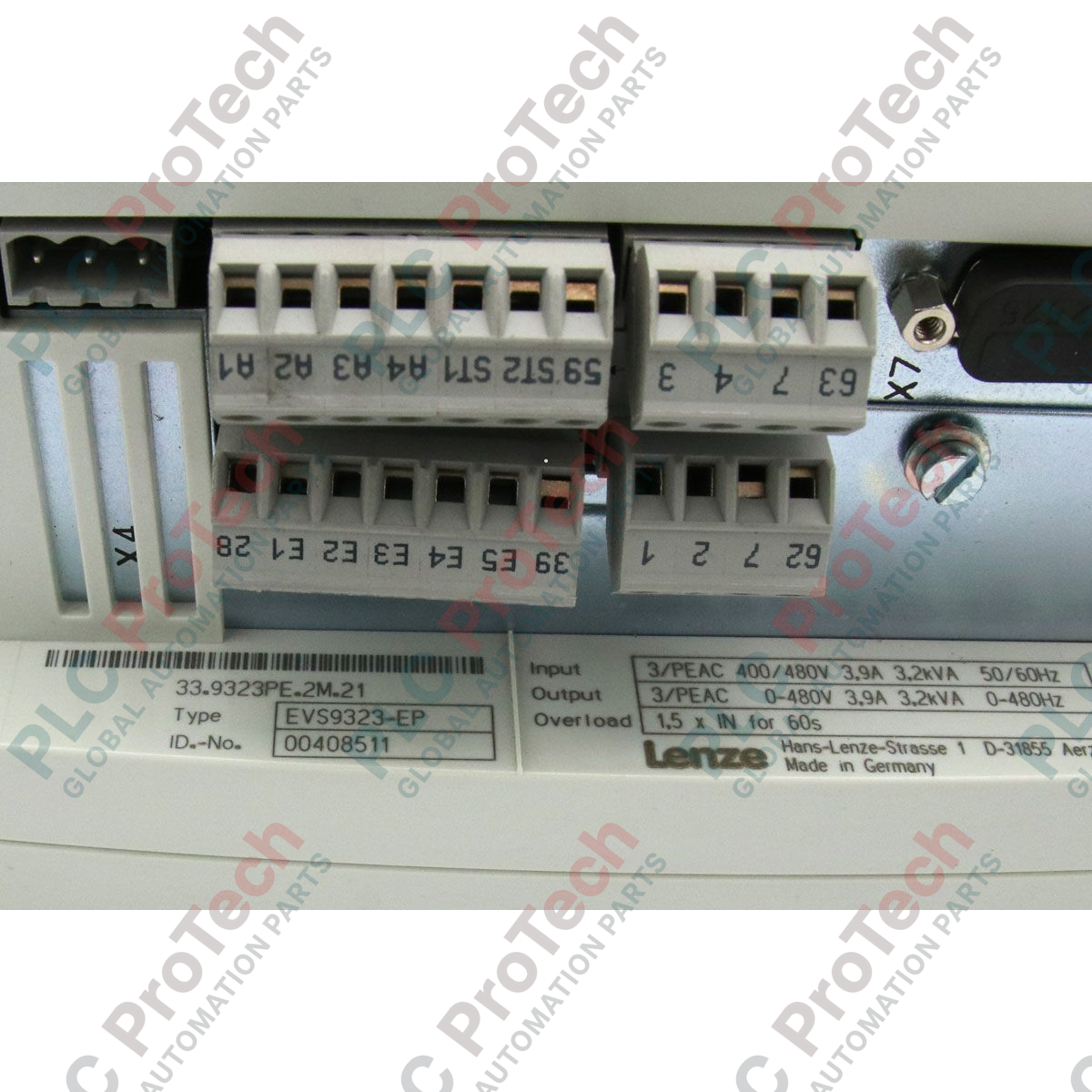
EVS9323-EP |
| Serie |
Serie 9300 |
| Tipo de dispositivo |
Controlador de posición servo |
| Potencia nominal de salida |
1.5 kW |
| Grado de protección |
IP20 |
| Dimensiones (An x Al x Pr) |
10.20 cm x 35.60 cm x 25.40 cm |
| Peso |
4.90 kg |
| Código de mercancía |
85044095 |
| Clasificación de control de exportación (ECCN) |
N |
Conexiones e interfaces
| Terminal / Puerto |
Función / Asignación de circuito |
| X1 |
Entradas y salidas analógicas (puntos de ajuste de velocidad/par de torsión, monitoreo) |
| X2 |
Entradas y salidas digitales (inicio, parada, interruptores de límite, estado listo) |
| X4 |
Bus del sistema CAN (conexión del bus del sistema, sincronización) |
| X11 |
Entrada del resolver (conexión de retroalimentación del motor) |
| Ranura AIF |
Interfaz de automatización para módulos de comunicación enchufables (por ejemplo, PROFIBUS) |
Perspectivas empíricas de ingeniería
Modelos alternativos y compatibilidad
El EVS9323-EP está configurado específicamente como controlador de posición. No debe confundirse con el EVS9323-ES (variante de controlador de velocidad) o el EVF9323 (inversor de frecuencia). Al reemplazar revisiones de hardware antiguas, verifique que la versión del firmware de la unidad de reemplazo coincida o supere la original para garantizar la compatibilidad con los conjuntos de parámetros Global Drive Control (GDC) y las configuraciones de bus de campo existentes.
Errores comunes en la aplicación y notas de ingeniería
En aplicaciones que involucren ciclos de desaceleración rápida o cargas de alta inercia, la capacitancia interna del bus de CC puede ser insuficiente para absorber la energía regenerativa. Para evitar fallos por sobretensión (normalmente indicados por el código de fallo OU), se debe dimensionar y conectar una resistencia de frenado externa a través de los terminales de alimentación correspondientes. Asegure un espacio libre adecuado de al menos 100 mm por encima y por debajo del variador dentro del armario para evitar acumulación térmica.
Consejos para puesta en marcha y cableado
Utilice siempre cableado de par trenzado con doble blindaje para las interfaces de retroalimentación del resolver (X11) y del bus del sistema CAN (X4). El blindaje debe estar conectado a tierra con conexiones de baja impedancia directamente a la placa de montaje mediante abrazaderas de tierra. Evite enrutar los cables de control y retroalimentación paralelos a los cables de alimentación de motor de alta tensión para mitigar problemas de interferencia electromagnética (EMI).
Directrices de instalación
ADVERTENCIA CRÍTICA: Asegúrese de la desenergización física completa del suministro de red antes de manipular. Los condensadores del bus de CC retienen voltajes letales (hasta 800V CC) después de apagar la alimentación. Espere un mínimo de 5 minutos para que la carga residual se descargue a niveles seguros (< 50V CC) antes de iniciar cualquier procedimiento de cableado, conexión de terminales o inspección. Verifique con un multímetro calibrado.
1
Monte el controlador verticalmente en una placa trasera plana y libre de vibraciones dentro de un armario de control con clasificación IP54 o superior para mantener la clasificación de protección IP20.
2
Conecte el conductor de tierra de protección (PE) al terminal de tierra designado antes de realizar cualquier otra conexión eléctrica.
3
Conecte los terminales de alimentación del motor (U, V, W) y el resolver de retroalimentación (X11) usando cables blindados, asegurando una correcta terminación del blindaje en la placa de tierra del variador.
4
Complete el cableado de control (X1, X2) y configure las resistencias de terminación de la red CAN (120 Ohm) si la unidad está posicionada en el extremo físico del segmento de red.