Description
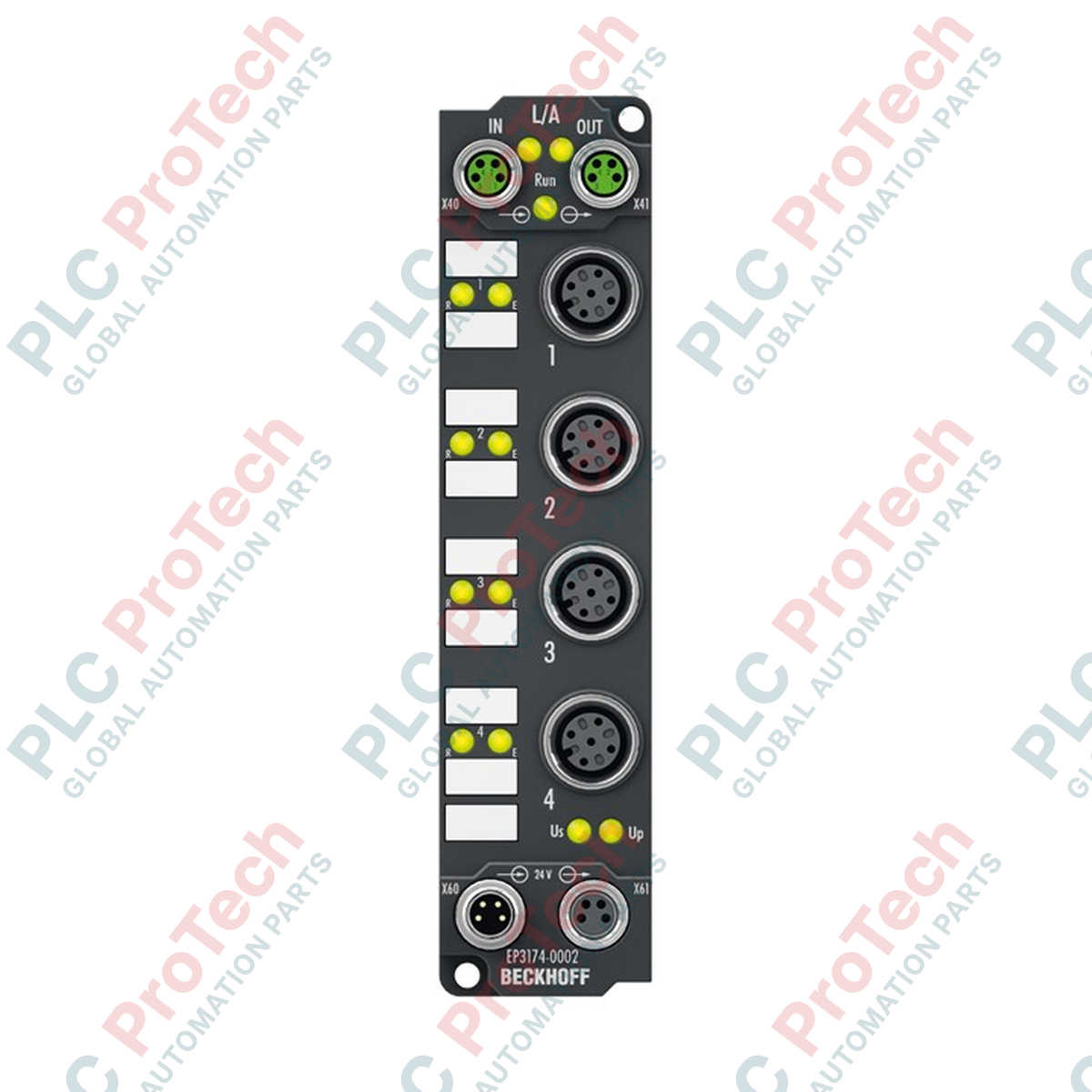
Engineered for direct field deployment without an electrical cabinet, the Beckhoff EP3174-0002 provides highly precise acquisition of analog industrial signals over EtherCAT. This rugged IP67-rated module features four individually parameterizable differential inputs, allowing seamless software configuration between voltage (-10 to +10 V) and current (0/4 to 20 mA) measurement modes per channel. By combining high-speed 16-bit analog-to-digital conversion with Distributed Clocks capability, it guarantees synchronized, low-latency data acquisition across decentralized network architectures.
Product Features
-
Four Parameterizable Channels: Individually configurable for -10/0...+10 V or 0/4...20 mA signals via TwinCAT software.
-
Rugged IP67 Protection: Fully sealed housing enables direct machine mounting under harsh environmental conditions.
-
High-Resolution Digitization: 16-bit analog-to-digital converter (including sign) delivers precise process values.
-
Distributed Clocks (DC): Supports microsecond-precise synchronization with other EtherCAT network components.
-
Diagnostic Feedback: Integrated status LEDs for EtherCAT network state, channel condition, and auxiliary power.
Applications
- Automotive assembly lines and decentralized manufacturing cells.
- Process automation installations requiring field-mounted sensors.
- Multi-axis motion control synchronization using Distributed Clocks.
- Wind power plants and heavy machinery tracking in high-vibration zones.
Technical Specifications
| Parameter |
Specification Value |
| Manufacturer |
Beckhoff Automation |
| Model Number |
EP3174-0002 |
| Protocol |
EtherCAT |
| Number of Inputs |
4 differential inputs |
| Signal Type |
-10 V to +10 V | 0 mA to 20 mA | 4 mA to 20 mA (configurable per channel) |
| Resolution |
16-bit (including sign) |
| Internal Resistance |
> 200 kOhm (voltage) | typ. 85 Ohm + diode voltage (current) |
| Common-Mode Voltage (U_CM) |
Max. 35 V |
| Measurement Error |
< +-0.3% (relative to full scale value) |
| Conversion Time |
approx. 100 microseconds |
| Input Filter Limit Frequency |
5 kHz (configurable filter) |
| Nominal Power Supply |
24 V DC (-15% / +20%) |
| Current Consumption from U_S |
120 mA |
| Electrical Isolation |
500 V (functional isolation) |
| Operating Temperature |
-25 degC to +60 degC |
| Storage Temperature |
-40 degC to +85 degC |
| Protection Rating |
IP65 / IP66 / IP67 (conforms to EN 60529) |
| Ex Marking |
II 3 G Ex nA IIC T4 Gc (ATEX Zone 2) |
| Vibration/Shock Resistance |
Conforms to EN 60068-2-6 / EN 60068-2-27 |
| EMC Immunity/Emission |
Conforms to EN 61000-6-2 / EN 61000-6-4 |
| Net Weight |
approx. 165 g |
| Shipping Weight (Calculated) |
2.0 kg (including protective packaging) |
Connections and Interfaces
| Connection Port |
Connector Type |
Signal Assignment |
| EtherCAT Bus (In/Out) |
2 x M8 socket, shielded, screw type |
EtherCAT transmit and receive pairs |
| Analog Inputs (Channels 1-4) |
4 x M12 female connector, 5-pin, A-coded |
Differential Input +, Differential Input -, Sensor Supply (+24V UP), Ground (GND), Shield |
| Power Feed |
1 x M8 male socket, 4-pin |
Control voltage U_S (24V DC), Load voltage U_P (24V DC) |
| Power Downstream |
1 x M8 female socket, 4-pin |
Loop-through of U_S and U_P to downstream modules |
Empirical Engineering Insights
Alternative Models & Compatibility
The EP3174-0002 serves as the IP67 field-mounted equivalent of the Beckhoff EL3174 EtherCAT Terminal. While they share identical TwinCAT process image structures and parameterization objects (CoE index 0x8000), note that physical fieldbus routing differs: the EP module requires M8 cabling rather than terminal blocks. Ensure TwinCAT 3 version 3.1.4024 or higher is deployed to take full advantage of the advanced diagnostic indices.
Application Pitfalls & Engineering Notes
The common-mode voltage limit (U_CM) is rated at a maximum of 35 V. If your differential signals are referenced to a ground potential that floats beyond this limit relative to the module's supply ground, measurement saturation or analog front-end damage can occur. Always verify that a low-impedance ground connection is maintained between decoupled power domains. When operating in current mode, the module presents an internal resistance of approximately 85 Ohms plus a diode voltage drop; ensure your field transmitters have sufficient compliance voltage to drive this combined load.
Commissioning & Wiring Tips
By default, channels may initialize in voltage mode. To parameterize a channel to current mode (e.g., 4 to 20 mA), navigate to the TwinCAT System Manager, select the EP3174-0002 module, go to the CoE - Online tab, and modify the "Presentation" and "Range" indices inside the 0x80n0 object directory (where n corresponds to the channel index 0 to 3). For maximum high-frequency noise immunity, construct a 360-degree shield termination on the M12 mating connector backshell to ground electromagnetic interference directly to the module's integrated mounting plate.
Installation Guidelines
CRITICAL WARNING: ELECTRICAL HAZARD
Ensure all power supplies (U_S and U_P) are physically isolated and locked out before initiating mounting, wiring, or maintenance on this EtherCAT Box. Failure to de-energize the fieldbus line can lead to sudden electrical arcs, damage to high-sensitivity internal conversion components, or unexpected machinery behavior.
1
Mount the module onto a flat, grounded metallic surface using two M3 screws through the mounting holes. Ensure the metal plate has a low-impedance connection to the machine chassis ground.
2
Connect the incoming EtherCAT network cable to the top-left M8 socket (marked as IN) and the downstream line to the OUT socket. Securely hand-tighten the M8 threaded collars to achieve IP67 protection.
3
Wire the analog field sensors to the respective M12 (Channels 1 to 4) sockets using shielded, twisted-pair cables. Use torque wrenches calibrated for M12 connectors (typically 0.6 Nm) to seal the interface.
4
Apply 24V DC auxiliary power to the M8 power feed socket. Verify that the "Us" (Logic Power) and "Up" (Peripheral Power) LED indicators glow solid green prior to starting the EtherCAT master network scan.