Conçu pour le contrôle précis des mouvements et les tâches de positionnement dynamique dans des environnements industriels automatisés, le Lenze EVS9323-EP sert de contrôleur de position servo haute performance au sein de la famille Série 9300. Cette unité s’intègre parfaitement dans des architectures de contrôle centralisées ou décentralisées, offrant un contrôle en boucle fermée robuste pour moteurs servo AC synchrones et asynchrones. Conçu avec un indice de protection IP20, il est optimisé pour une installation verticale dans des armoires électriques protégées, garantissant une gestion thermique fiable et une stabilité opérationnelle à long terme dans des processus de fabrication exigeants.
Caractéristiques principales
-
Contrôle de position intégré : Générateurs de profils et registres de position intégrés supportant des profils de mouvement complexes, des courses de référence et des séquences de positionnement cible sans nécessiter de modules PLC haute vitesse externes.
-
Interface bus système : Intégration native du bus système CAN permettant une communication à haute vitesse entre plusieurs entraînements, contrôleurs et systèmes HMI de supervision.
-
Support flexible du retour d’information : Compatible avec les systèmes résolveurs standard et les encodeurs haute résolution pour un retour précis de la vitesse et de la position.
-
Gestion thermique : Conçu pour un montage vertical avec une géométrie optimisée du dissipateur thermique afin de faciliter un refroidissement naturel ou forcé efficace.
-
Extension modulaire : Prend en charge des modules de communication enfichables (AIF) pour l’intégration dans PROFIBUS, Interbus ou d’autres réseaux de terrain industriels.
Applications
-
Machines d’emballage : Indexation à grande vitesse, coupeurs rotatifs et systèmes d’engrenage électronique.
-
Manutention : Systèmes automatisés de stockage et de récupération (ASRS), portiques et chariots de transfert à grande vitesse.
-
Assemblage & Robotique : Systèmes multi-axes de pick-and-place, robots cartésiens et tables d’indexation rotatives précises.
-
Traitement textile : Enroulement contrôlé en tension, déroulement et commande synchronisée des axes d’alimentation.
Spécifications techniques
| Paramètre |
Valeur / Spécification |
| Fabricant |
Lenze |
| Numéro de modèle |
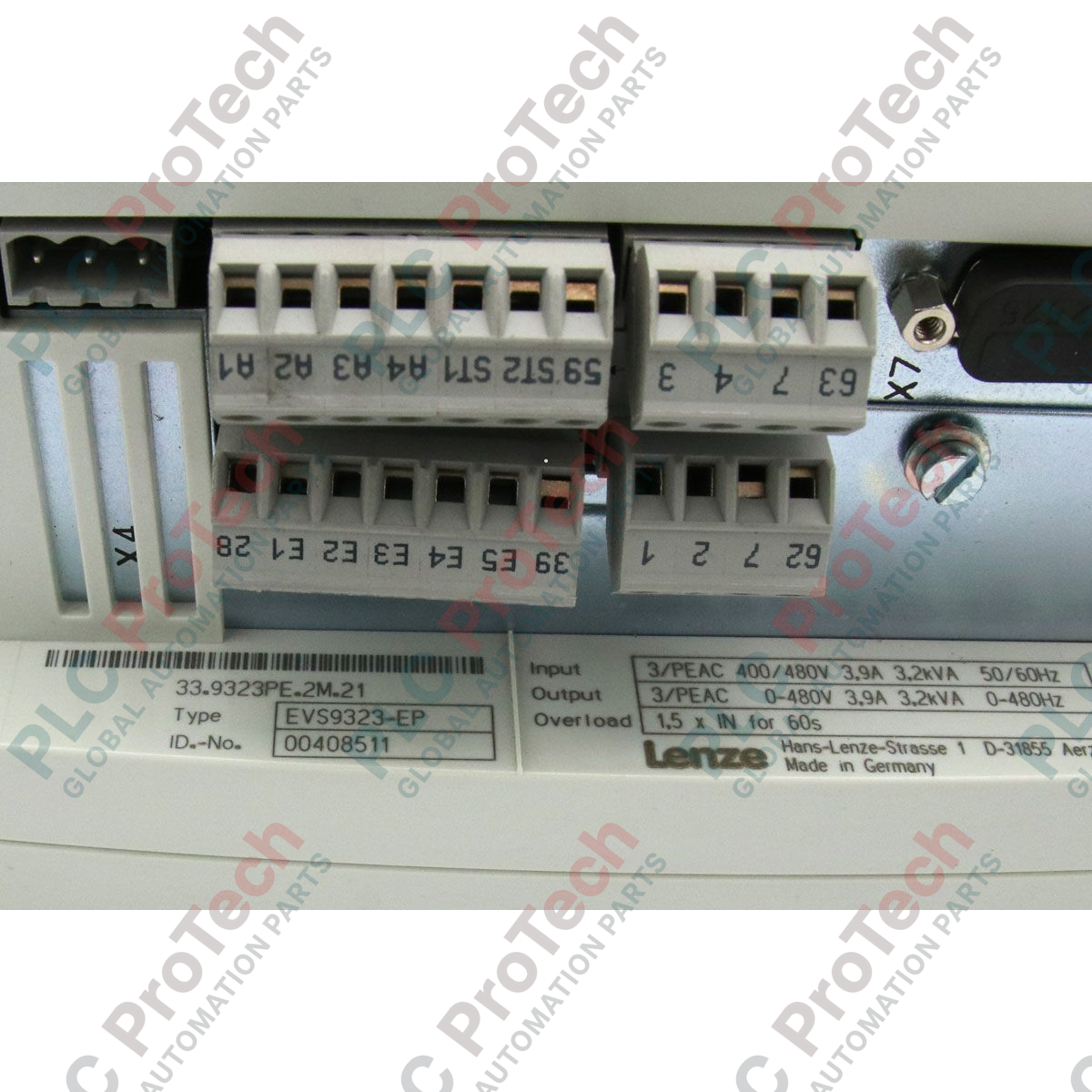
EVS9323-EP |
| Série |
Série 9300 |
| Type d’appareil |
Contrôleur de position servo |
| Puissance nominale de sortie |
1,5 kW |
| Degré de protection |
IP20 |
| Dimensions (L x H x P) |
10,20 cm x 35,60 cm x 25,40 cm |
| Poids |
4,90 kg |
| Code produit |
85044095 |
| Classification du contrôle des exportations (ECCN) |
N |
Connexions et interfaces
| Bornier / Port |
Fonction / Attribution du circuit |
| X1 |
Entrées et sorties analogiques (consignes de vitesse/couple, surveillance) |
| X2 |
Entrées et sorties numériques (démarrage, arrêt, interrupteurs de fin de course, état prêt) |
| X4 |
Bus système CAN (connexion bus système, synchronisation) |
| X11 |
Entrée résolveur (connexion de retour moteur) |
| Emplacement AIF |
Interface d’automatisation pour modules de communication enfichables (par exemple, PROFIBUS) |
Aperçus empiriques d’ingénierie
Modèles alternatifs et compatibilité
L’EVS9323-EP est spécifiquement configuré comme contrôleur de position. Il ne doit pas être confondu avec l’EVS9323-ES (variante contrôleur de vitesse) ou l’EVF9323 (variateur de fréquence). Lors du remplacement de révisions matérielles plus anciennes, vérifiez que la version du firmware de l’unité de remplacement correspond ou dépasse l’originale pour garantir la compatibilité avec les jeux de paramètres Global Drive Control (GDC) et les configurations de bus de terrain existants.
Pièges d’application et notes d’ingénierie
Dans les applications impliquant des cycles de décélération rapide ou des charges à forte inertie, la capacité interne du bus DC peut être insuffisante pour absorber l’énergie régénérative. Pour éviter les défauts de surtension (généralement indiqués par le code de défaut OU), une résistance de freinage externe doit être dimensionnée et connectée aux bornes d’alimentation appropriées. Assurez-vous d’un dégagement suffisant d’au moins 100 mm au-dessus et en dessous du variateur à l’intérieur de l’armoire pour éviter l’accumulation thermique.
Conseils de mise en service et de câblage
Utilisez toujours des câbles torsadés à double blindage pour les interfaces de retour résolveur (X11) et du bus système CAN (X4). La blindage doit être mise à la terre avec des connexions à faible impédance directement sur la plaque de montage à l’aide de pinces de mise à la terre. Évitez de faire passer les câbles de commande et de retour parallèlement aux câbles d’alimentation moteur haute tension pour réduire les interférences électromagnétiques (EMI).
Consignes d’installation
AVERTISSEMENT CRITIQUE : Assurez-vous de la coupure complète et physique de l’alimentation secteur avant toute manipulation. Les condensateurs du bus DC conservent des tensions mortelles (jusqu’à 800 V DC) après la coupure. Attendez au moins 5 minutes que la charge résiduelle descende à un niveau sûr (< 50 V DC) avant d’entamer tout câblage, connexion de bornier ou inspection. Vérifiez avec un multimètre calibré.
1
Montez le contrôleur verticalement sur une plaque arrière plane et sans vibrations à l’intérieur d’une armoire de commande IP54 ou supérieure pour maintenir le degré de protection IP20.
2
Connectez le conducteur de terre de protection (PE) à la borne de mise à la terre désignée avant d’effectuer toute autre connexion électrique.
3
Câblez les bornes d’alimentation du moteur (U, V, W) et le résolveur de retour (X11) en utilisant des câbles blindés, en assurant une bonne terminaison de la blindage sur la plaque de mise à la terre du variateur.
4
Complétez le câblage de commande (X1, X2) et configurez les résistances de terminaison du bus CAN (120 Ohm) si l’unité est positionnée à l’extrémité physique du segment réseau.