Description
Direct, high-precision microstepping control for medium-power bipolar stepper motors is executed seamlessly by the Beckhoff EL7037 EtherCAT Terminal. Operating as a fully integrated 1-channel motion interface within the EtherCAT I/O environment, this compact 12 mm module houses both the power electronics and a feedback encoder interface. By supporting advanced vector control and 64-fold microstepping, the unit ensures exceptionally smooth motor rotation, minimized resonance, and precise dynamic positioning. It interfaces directly with 2-phase stepper motors up to 24 V DC at a continuous output current of 1.5 A, which can be further scaled using external thermal management accessories.
Key Features
-
Closed-Loop Positioning: Integrated single-ended incremental encoder input supporting real-time feedback and positioning verification.
-
64-Fold Microstepping: Smooth dynamic performance and high-resolution positioning via configurable microstepping profiles up to 16,000 full steps per second.
-
Integrated Vector Control: Fields-oriented current control algorithm reduces motor heating and enhances system efficiency.
-
Distributed Clocks (DC): Synchronous operational capability with sub-microsecond synchronization across the EtherCAT network.
-
High-Density (HD) Housing: Standard 12 mm wide DIN rail module featuring dedicated signal LEDs for diagnostics and status indication.
Target Industrial Applications
-
Packaging and Labelling Systems: Precision feed-axis adjustments and quick-change format control.
-
Semiconductor Handling: Cleanroom-compatible wafer handling and micro-positioning gantries.
-
Assembly and Pick-and-Place: High-speed Cartesian component placement and orientation.
-
Analytical Laboratory Automation: Low-noise liquid handling pumps, pipetting axes, and sample carousel rotation.
Technical Specifications
| Parameter |
Specification Values |
| Manufacturer |
Beckhoff Automation |
| Model / Part Number |
EL7037 |
| Module Type |
EtherCAT Terminal, 1-Channel Motion Interface |
| Supply Voltage (Power) |
24 V DC (via power contacts) |
| Output Current (Standard) |
Max. 1.5 A continuous |
| Output Current (With ZB8610) |
Max. 3.0 A continuous (requires ZB8610 fan cartridge) |
| Load Type |
2-phase stepper motor (unipolar or bipolar) |
| E-Bus Current Consumption |
Typical 100 mA |
| Power Contact Current Consumption |
Typical 50 mA + motor current |
| Encoder Input Signal |
5 to 24 V DC, typical 5 mA, single-ended |
| Software Compatibility |
TwinCAT 2, TwinCAT 3 (via NC PTP or CoE Drive parameters) |
| Step Frequency / Resolution |
Configurable up to 16,000 full steps/s; 64-fold microstepping |
| Electrical Isolation |
500 V (E-bus / field potential) |
| Dimensions (W x H x D) |
12 mm x 100 mm x 68 mm |
| Operating Temperature Range |
0 degC to +55 degC (non-condensing relative humidity max. 95%) |
| Country of Origin |
Germany |
| Shipping Weight (Calculated) |
2.00 kg (with secure protective packaging) |
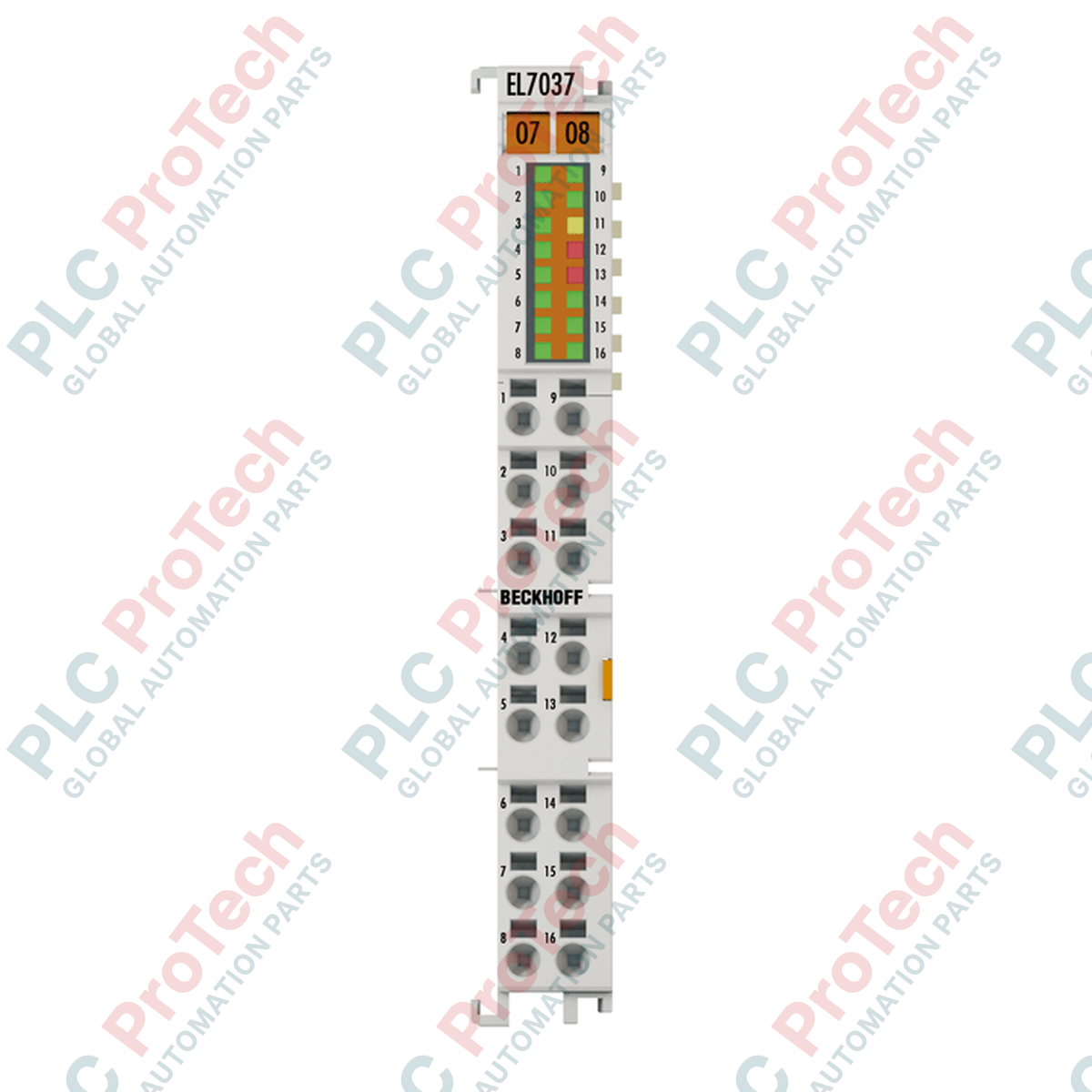
Connections and Interfaces
| Terminal Point |
Signal Assignment |
Description |
| 1 |
A1 |
Motor Phase A, Connection 1 |
| 2 |
B1 |
Motor Phase B, Connection 1 |
| 3 |
+24 V DC Feed |
Power supply contact for motor power path |
| 4 |
Encoder A |
Incremental Encoder Channel A Input (Single-ended) |
| 5 |
A2 |
Motor Phase A, Connection 2 |
| 6 |
B2 |
Motor Phase B, Connection 2 |
| 7 |
0 V DC |
Common power contact return path |
| 8 |
Encoder B |
Incremental Encoder Channel B Input (Single-ended) |
Alternative Models & Compatibility
The Beckhoff EL7037 functions as a direct drop-in step-up from the legacy EL7031 terminal, providing vastly enhanced microstepping control (64-fold vs 64-fold on select versions but with superior vector current optimization). When swapping older EL7031 units in pre-existing projects, check the TwinCAT System Manager hardware revision indices; configuration profiles may require adjusting the CAN over EtherCAT (CoE) register configurations to leverage the integrated vector control options native to the EL7037.
Application Pitfalls & Engineering Notes
Thermal dissipation limits must be rigorously managed when mounting multiple EL7037 terminals adjacently in an unventilated enclosure. Operating continuously near 1.5 A per channel causes thermal load escalation. For multi-axis applications where continuous currents exceed 1.0 A per terminal, installation of the ZB8610 fan cartridge is highly recommended. Ensure adequate side-by-side clearance or active cabinet ventilation to prevent thermal safety shutdowns on the internal bridge drivers.
Commissioning & Wiring Tips
Always use shielded, low-capacitance twisted-pair cables for motor connections to mitigate electromagnetic interference (EMI). The encoder feedback signal lines are particularly susceptible to motor line crosstalk; route the encoder wires and the motor phase wires separately. Ground the cable shields directly at the cabinet entry point using low-impedance ground clamps. When configuring TwinCAT NC PTP, ensure motor coil resistance and inductance values are accurately keyed into the CoE startup parameter list to allow the current controller loop (operating at approximately 30 kHz) to stabilize correctly.
Installation Guidelines
CRITICAL WARNING
Before beginning terminal installation, wire modifications, or configuration changes, verify that the 24 V DC system power supply and the 24 V DC power contact feeds have been fully de-energized. Failure to de-energize the power path prior to connecting or disconnecting the motor phases can result in terminal bridge destruction and permanent system failure.
1
Mount the EL7037 onto a standard 35 mm DIN rail conforming to EN 60715. Secure the latching mechanism firmly against the slide block.
2
Using a standard flat-head screwdriver, engage the push-in spring connections to secure solid or stranded wires with wire end ferrules.
3
Interconnect the side-by-side terminal bus contacts, ensuring clean connection with adjacent terminals for proper E-bus data transmission.